Key Significance
- Flow Matching-based VLA Design: Introduced a new VLA design combining pretrained VLM with Flow Matching-based continuous action generation
- VLM Knowledge Transfer to Robots: Leverages PaliGemma (3B) VLM’s internet-scale knowledge for dexterous manipulation
- 50Hz High-Frequency Control: Generates 50 motor commands per second via Action Chunking
- 8 Robot Platforms: Learns across diverse embodiments including single arm, bimanual, and mobile manipulators
- Dominates OpenVLA/Octo: Overwhelming performance advantage over existing open-source VLAs in complex dexterous tasks
- Open-Source Release: Complete release of weights, training code, JAX/PyTorch implementation via openpi
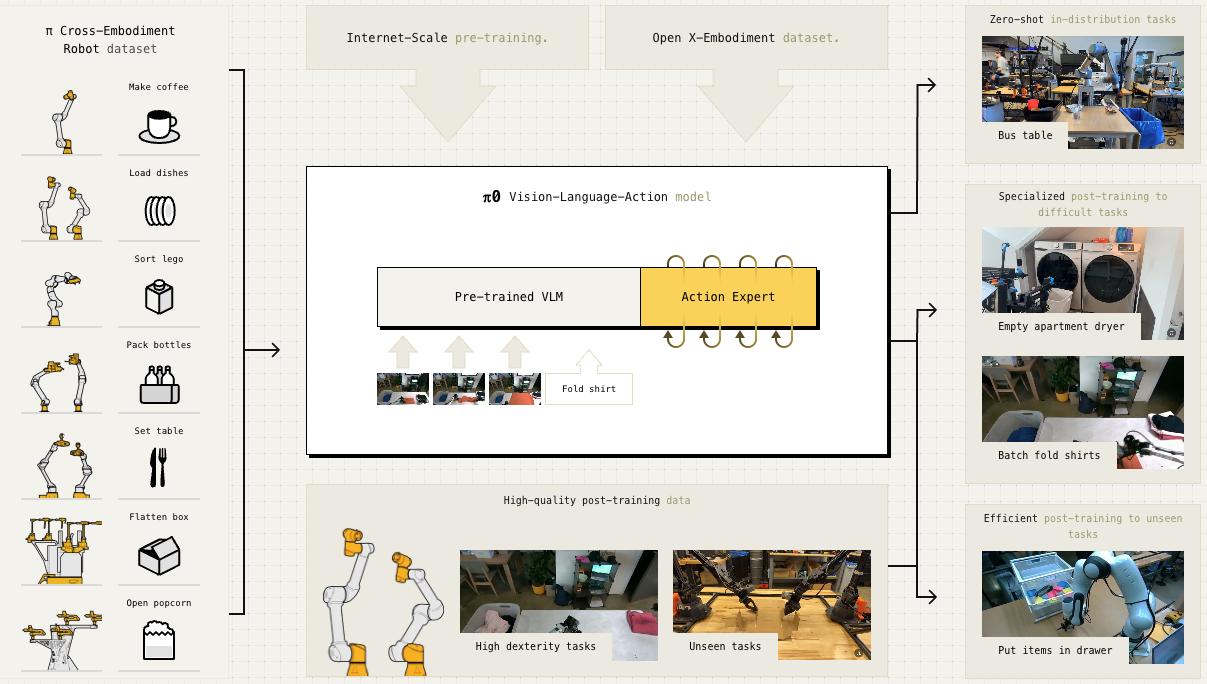
Pi0 Architecture: PaliGemma VLM + Flow Matching Action Expert
Overview
Pi0 (pi-zero) is the first general-purpose robot foundation model announced by Physical Intelligence in October 2024 after 8 months of development. Founded by researchers who led Google DeepMind’s RT series, they presented a new VLA paradigm based on Flow Matching.
| Item | Details |
|---|---|
| Published | October 31, 2024 |
| Company | Physical Intelligence |
| Paper | arXiv:2410.24164 |
| Blog | pi.website/blog/pi0 |
| GitHub | Physical-Intelligence/openpi |
Architecture
Pi0 is a VLM + Flow Matching Action Expert hybrid architecture.
Model Specifications
| Component | Spec |
|---|---|
| VLM Backbone | PaliGemma (3B) |
| Action Expert | +300M parameters |
| Total Parameters | ~3.3B |
| Control Frequency | 50Hz |
| Action Horizon | 50 steps (1 second) |
What is Flow Matching?
Alternative to Diffusion for modeling continuous distributions:
| Feature | Description |
|---|---|
| Continuous Distribution | Handles complex multimodal action distributions |
| Efficiency | Faster sampling than Diffusion |
| Transformer Integration | Natural combination with VLM |
| High-Frequency Control | Suitable for action chunk generation |
Action Expert
Module handling robot control separately from VLM:
- 300M additional parameters: Separate Transformer weights
- Proprioceptive processing: Robot state information encoding
- Bidirectional attention: Ensures consistency between action tokens
- Continuous output: Generates continuous commands via flow matching
Training Data
Pi Dataset
Dexterous manipulation data directly collected by Physical Intelligence:
| Item | Details |
|---|---|
| Total Data | 10,000+ hours |
| Robot Platforms | 8 |
| Tasks | 68 |
Supported Robot Platforms
| Robot | Type |
|---|---|
| UR5e | Single arm |
| Bimanual UR5e | Bimanual |
| Franka | Single arm |
| Bimanual Trossen | Bimanual |
| Bimanual ARX | Bimanual |
| Mobile Trossen | Mobile manipulator |
| Mobile Fibocom | Mobile manipulator |
Task Examples
- Laundry folding
- Coffee preparation
- Grocery bagging
- Table bussing
- Cable routing
- Box assembly
- Power plug insertion
External Data
- Open X-Embodiment (OXE): Includes various robot data
- Internet Pretraining: Visual-language knowledge via PaliGemma VLM
Performance

Pi0 Zero-shot Performance vs OpenVLA/Octo on Complex Dexterous Tasks
vs OpenVLA, Octo (Zero-shot)
Comparison on complex multi-stage dexterous tasks:
| Task | Pi0 | Pi0-Small | OpenVLA | Octo |
|---|---|---|---|---|
| Bussing Easy (UR5e) | 97.1% | 44.3% | 0% | 4.3% |
| Bussing Hard (UR5e) | 87.5% | 33.3% | 0% | 0% |
| Shirt Folding (Bi-ARX) | 100% | 50% | 0% | 0% |
| Grocery Bagging (UR5e) | 78.6% | 27.1% | 0% | 0% |
| Toast from Toaster | 75% | 0% | 0% | 0% |
Effect of VLM Pre-training
| Comparison | Result |
|---|---|
| Pi0 (full) vs Pi0-Small | 2x+ performance improvement |
| Reason | Visual-language knowledge from VLM pretraining |
Key Insights
- OpenVLA/Octo at 0%: Fail on complex dexterous tasks
- Only Pi0 succeeds: Effectiveness of Flow matching + VLM combination
- Generalization ability: Consistent performance across various robots
Capabilities
Zero-shot Performance
Tasks performable with pretraining alone:
- Manipulation in settings similar to training environment
- Following language instructions
- Basic object manipulation
After Fine-tuning
Specialization with small additional data:
| Task | Required Data |
|---|---|
| Laundry folding | ~few hours |
| Box assembly | ~few hours |
| Complex manipulation | 1-20 hours |
Adaptive Behavior
- Recovery after human intervention
- Retry after failure
- Handling various object shapes
Open Source Release
Released through openpi repository in February 2025:
Released Models
| Model | Description |
|---|---|
| Pi0 base | Pretrained model for fine-tuning |
| Pi0-FAST base | FAST tokenizer applied (5x faster training) |
| Pi0 DROID | Franka single arm fine-tuned |
| Pi0 ALOHA | Bimanual manipulation fine-tuned |
| Pi0 Libero | Simulation environment fine-tuned |
Provided Resources
- JAX original implementation
- PyTorch implementation (HuggingFace LeRobot)
- Fine-tuning scripts
- Inference code
Pi0-FAST
Autoregressive version with FAST tokenizer applied:
| Feature | Details |
|---|---|
| Training Speed | 5x faster |
| Language Understanding | Better instruction following |
| Inference Cost | 4-5x higher |
Variants
| Variant | Method | Features |
|---|---|---|
| Pi0 | Flow Matching | Fast inference, continuous action |
| Pi0-FAST | Autoregressive | Fast training, better language understanding |
| Pi0-Small | Flow Matching | No VLM, lightweight |
Subsequent Versions
Evolved versions after Pi0:
| Version | Released | Key Improvements |
|---|---|---|
| Pi0.5 | 2025.04 | Open-world generalization |
| Pi*0.6 | 2025.11 | RL self-improvement |
Full series overview: Pi Series
References
See Also
Related People
- Karol Hausman - Physical Intelligence Co-founder
- Chelsea Finn - Physical Intelligence Co-founder
- Sergey Levine - Physical Intelligence Co-founder
- Pete Florence - Physical Intelligence Co-founder