What is Scaling Law?
In the LLM field, Scaling Law refers to the principle that increasing model size, data volume, and compute leads to predictable performance improvements.
| Factor | Description |
|---|---|
| Model Size | More parameters → Better performance |
| Data Volume | More training data → Better performance |
| Compute | More training compute → Better performance |
This law justified investment in large-scale models like GPT-3 and GPT-4. If the same formula works for robotics, companies would have motivation to invest in large-scale data collection and training.
Robotics Scaling Law: Current Evidence
Generalist AI’s Claims
Generalist GEN-0 claims to have discovered robotics scaling laws with 270,000 hours of real physical interaction data.
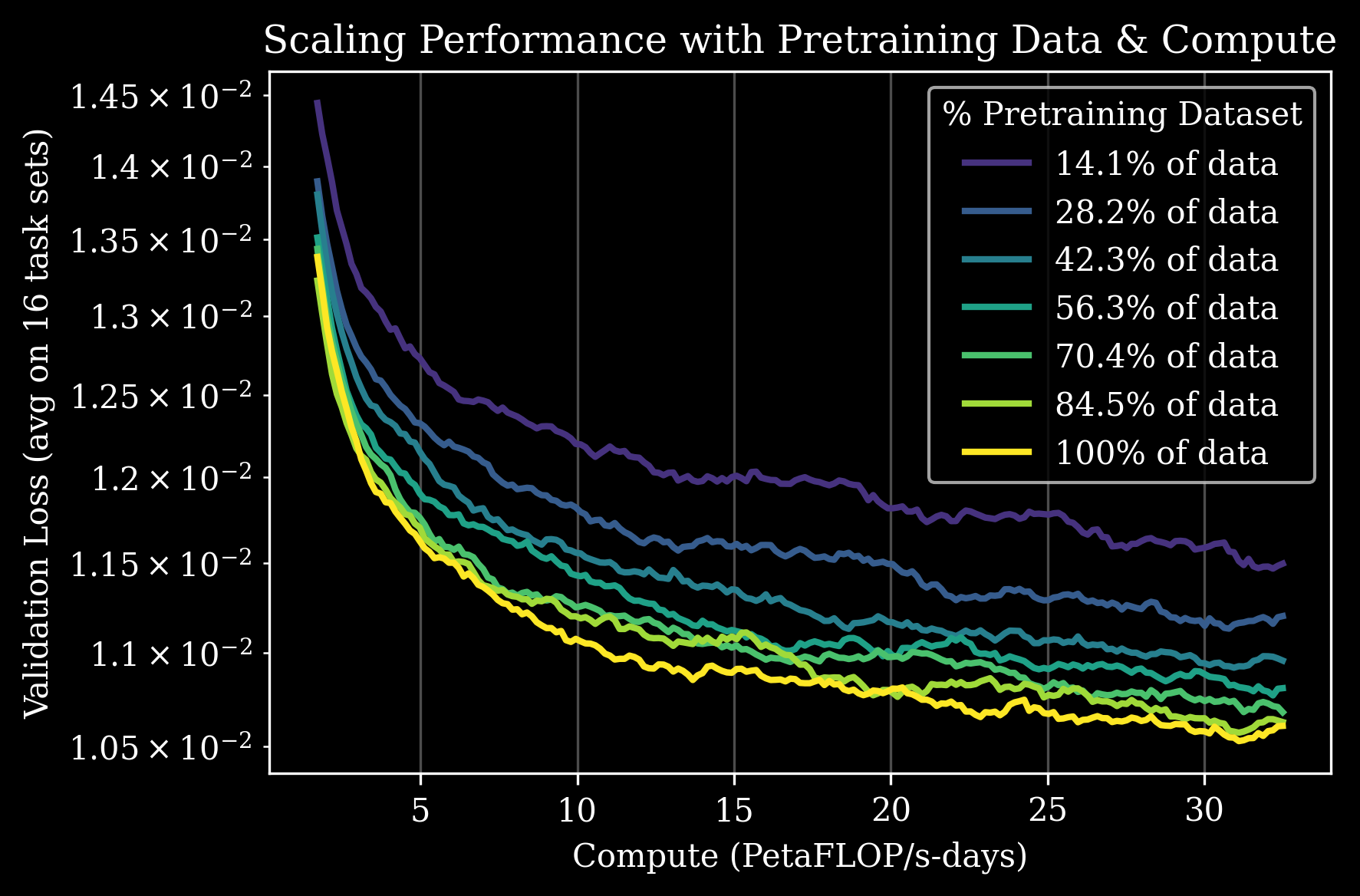
GEN-0 Scaling Law: Predictable performance improvement with data/compute increase (Source: Generalist AI)
Key Findings:
- Data ↑ → Performance ↑ (predictable improvement)
- Compute ↑ → Performance ↑ (consistent improvement)
- 7B Parameter Threshold: “Rigidity” at 1B, data internalization and continuous improvement at 7B+
| Parameters | Phenomenon |
|---|---|
| 1B | Fails to absorb complex data, learning stagnates |
| 7B+ | Data internalization, continuous improvement, adapts to new tasks |
Generalist AI claims this could be the “GPT-3 moment” for robotics.
NVIDIA GR00T’s Synthetic Data Experiment
GR00T N1 systematically validated the scaling effect of synthetic data.
| Data Type | Scale | Generation Time |
|---|---|---|
| Real teleoperation | 88 hours | - |
| Simulation trajectory | 780,000 | 11 hours |
| Neural trajectory | 300,000 | 1.5 days (3,600 GPUs) |
Key Results:
- +40% performance improvement with synthetic data (vs. real data only)
- 780K simulation trajectories = equivalent to 6,500 hours of human demos
- Neural trajectories add +5.8% additional improvement on average
Physical Intelligence π Series
π0 demonstrated the possibility of generalist policies by collecting 10,000+ hours of teleoperation data across 8 robot platforms.
Why is Robotics Scaling Difficult?
LLM vs Robotics Data
| Aspect | LLM | Robotics |
|---|---|---|
| Data Source | Internet (infinite) | Physical interaction (limited) |
| Collection Cost | Crawling (cheap) | Teleoperation (expensive) |
| Data Format | Text (uniform) | Various robots/sensors (heterogeneous) |
| Validation | Automatable | Requires physical verification |
Action Data Scaling Problem
As discussed in The Action Data Scaling Problem, collecting robot action data is inherently difficult:
- Physical Constraints: Robot must physically move
- Time Cost: 1 hour of data = 1+ hours of work
- Quality Control: Depends on human operator skill
- Safety Issues: Risk of hardware damage on failure
Solutions for Scaling
1. Synthetic Data
NVIDIA GR00T’s approach:
| Method | Description | Advantages |
|---|---|---|
| Simulation trajectory | Auto-generated in physics simulator | Mass generation, physical validity |
| Neural trajectory | Using video generation models | Diversity, rare scenarios |
780,000 trajectories in 11 hours = equivalent to 9 months of continuous human work
2. Cross-Embodiment Learning
Integrating data from various robots:
- Open X-Embodiment: 22 robot types, 1M+ episodes
- GR00T N1: Single model supports diverse platforms
- π0: Integrated learning across 8 robot platforms
3. Human Video Utilization
Learning from human behavior videos, not robot data:
- LAPA (GR00T N1): Extract latent actions from videos without action labels
- π0.5: Co-training with web videos
- Internet-scale video = potentially infinite data
4. Large-Scale Real Data Collection
Generalist AI’s approach:
- Diverse environments: homes, bakeries, laundromats, warehouses, factories
- 270,000 hours of pure robot data
- Focus on real physical interaction, not simulation
Data Scale Comparison
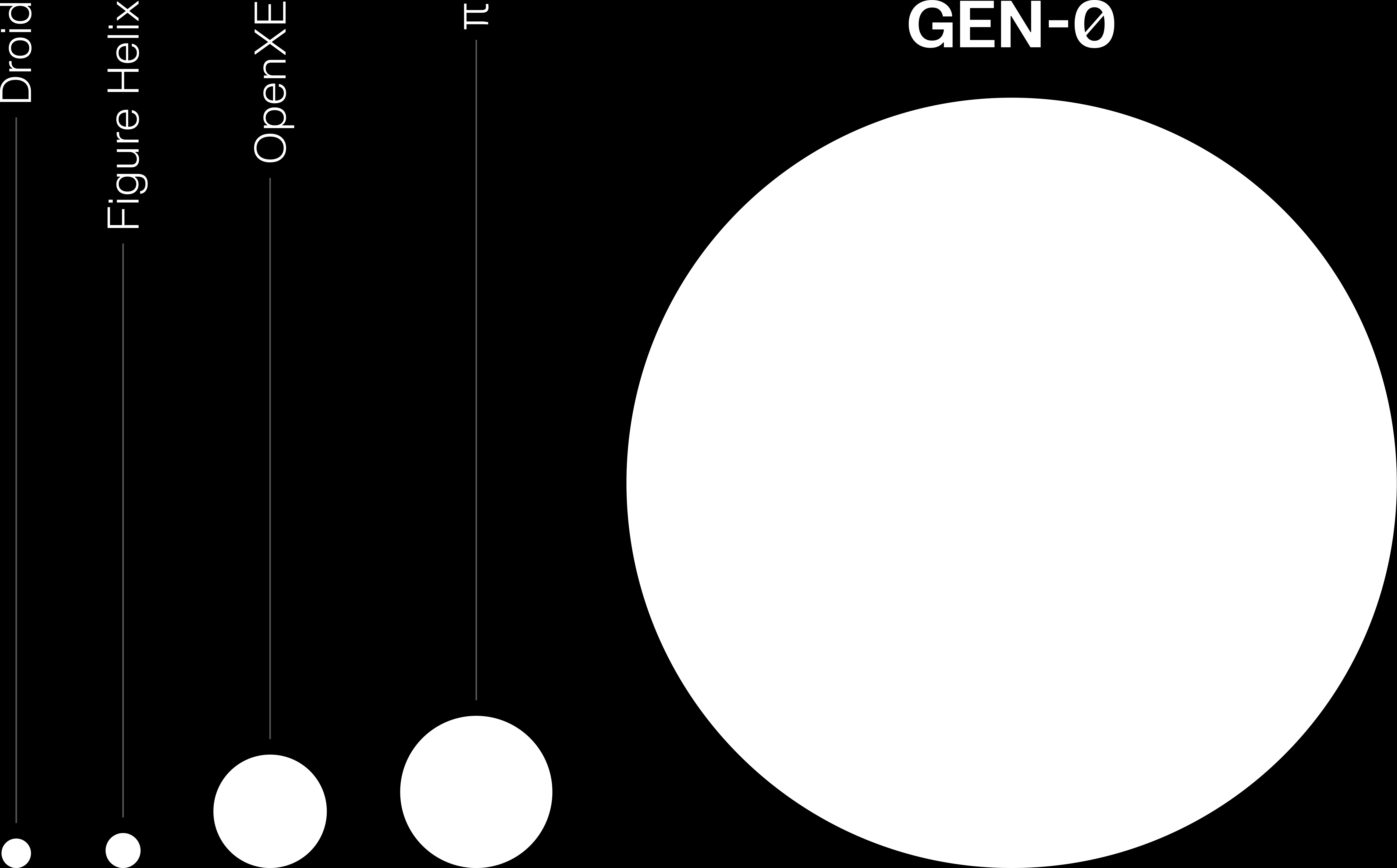
Data scale comparison of major VLA models (Source: Generalist AI)
| Model | Data Scale | Data Type |
|---|---|---|
| Generalist GEN-0 | 270,000 hours | Real robot |
| π0 | 10,000+ hours | Teleoperation |
| GR00T N1 | 88 hours + 780K synthetic | Real + Synthetic |
| Sunday ACT-1 | 10M+ episodes | Gloves (human motion) |
Conclusion: The Possibility of Scaling Laws
Positive Signals
- Generalist AI’s Discovery: Predictable performance improvement with data/compute increase
- Synthetic Data Effect: NVIDIA’s +40% performance improvement report
- 7B Threshold: Phase transition phenomenon similar to LLMs observed
Remaining Questions
- Verification Needed: Generalist AI’s claims lack external validation
- Data Quality vs Quantity: Is simply increasing quantity enough?
- Real vs Synthetic: Which data is more effective?
- Generalization Limits: Does scaling work for all tasks?
Whether robotics scaling laws work as powerfully as LLMs is still uncertain, but early evidence is encouraging. With continued large-scale investment and research, robotics may also have its “GPT moment.”
See Also
- The Action Data Scaling Problem - Fundamental difficulties of data collection
- Generalist GEN-0 - Claims of scaling law discovery
- GR00T N1 - Synthetic data effect validation
- π0 - Large-scale teleoperation data learning
- Teleoperation Approach - Data collection methods