Overview
| Item | Details |
|---|---|
| Initial Announcement | March 2024 (GTC 2024) |
| N1 Open-Source Release | March 2025 (GTC 2025) |
| Company | NVIDIA |
| GitHub | NVIDIA/Isaac-GR00T |
| License | Apache 2.0 |
Version History
| Item | N1 | N1.5 | N1.6 |
|---|---|---|---|
| Announced | 2025.03 GTC | 2025.05 Computex | 2025.09 CoRL |
| Parameters | 2.2B | 3B | 3B |
| VLM | Eagle2-1B | Eagle 2.5 (Frozen) | Cosmos-Reason-2B |
| DiT Layers | 16 | 16 | 32 |
| Action Space | Absolute | Absolute | Relative |
| Key Improvement | First open-source | FLARE, 2x language compliance | Scale-up, Loco-manipulation |
Dual-System Architecture
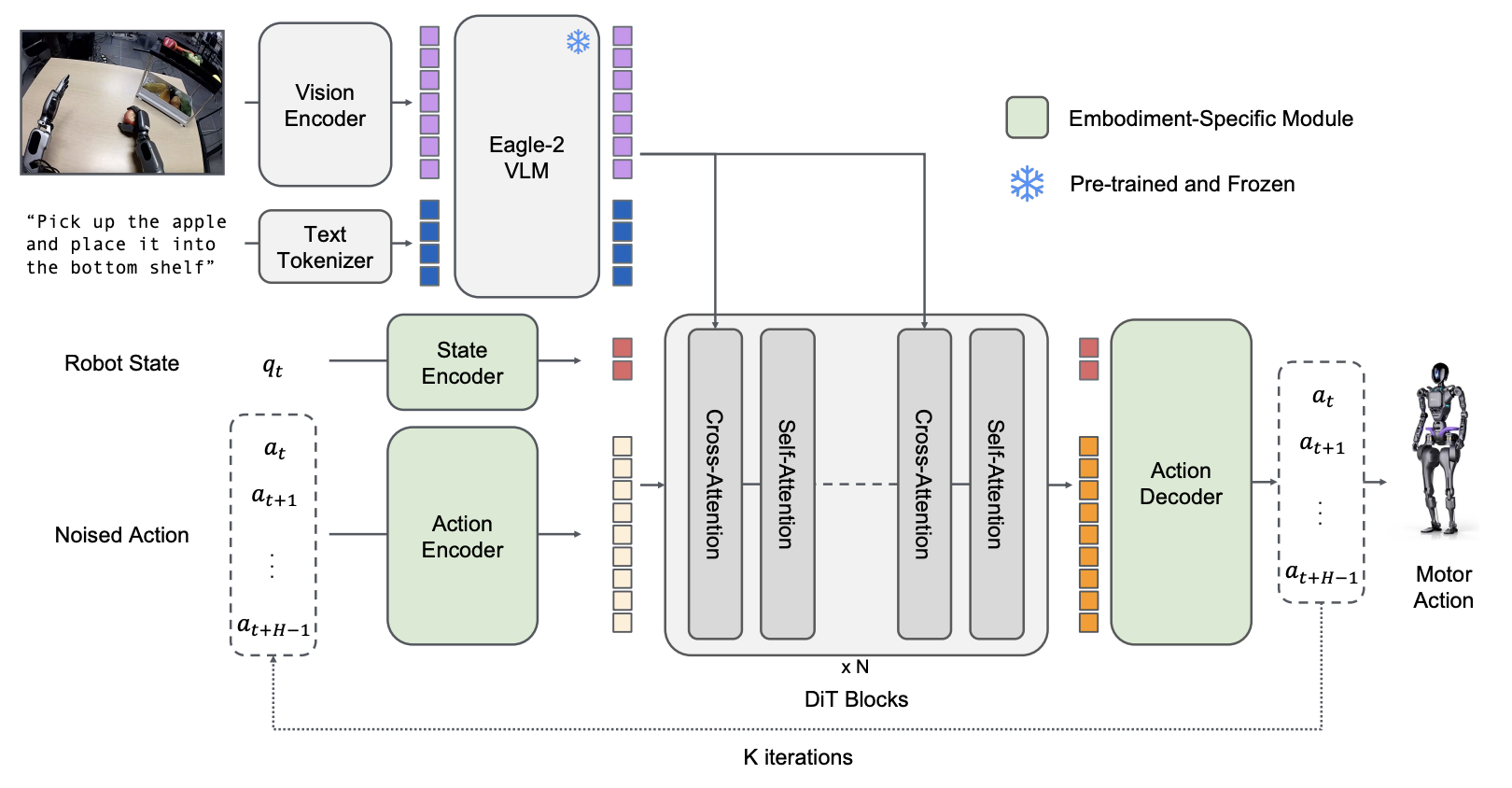
GR00T N1 Architecture: System 2 (VLM) + System 1 (DiT) Dual-System Structure
Inspired by human cognition principles (Kahneman, 2011):
| System | Role | Implementation |
|---|---|---|
| System 2 (Slow) | Environment understanding, planning | Vision-Language Model |
| System 1 (Fast) | Convert plans to precise motions | Diffusion Transformer |
References
See Also
GR00T Series
- GR00T N1 - First Open-Source Model
- GR00T N1.5 - Language Understanding Improvement, FLARE
- GR00T N1.6 - Scale Expansion, Loco-manipulation