WUJI Hand
One-line judgment
WUJI Hand looks like a strong candidate when the goal is to attach a high-DoF hand to a real robot arm and start collecting manipulation data quickly. Its low mass and ROS 2/SDK support are attractive, but petal-level manipulation still needs careful force limiting, contact sensing validation, and soft fingertip treatment.
Key Specs
| Item | Value | Interpretation |
|---|---|---|
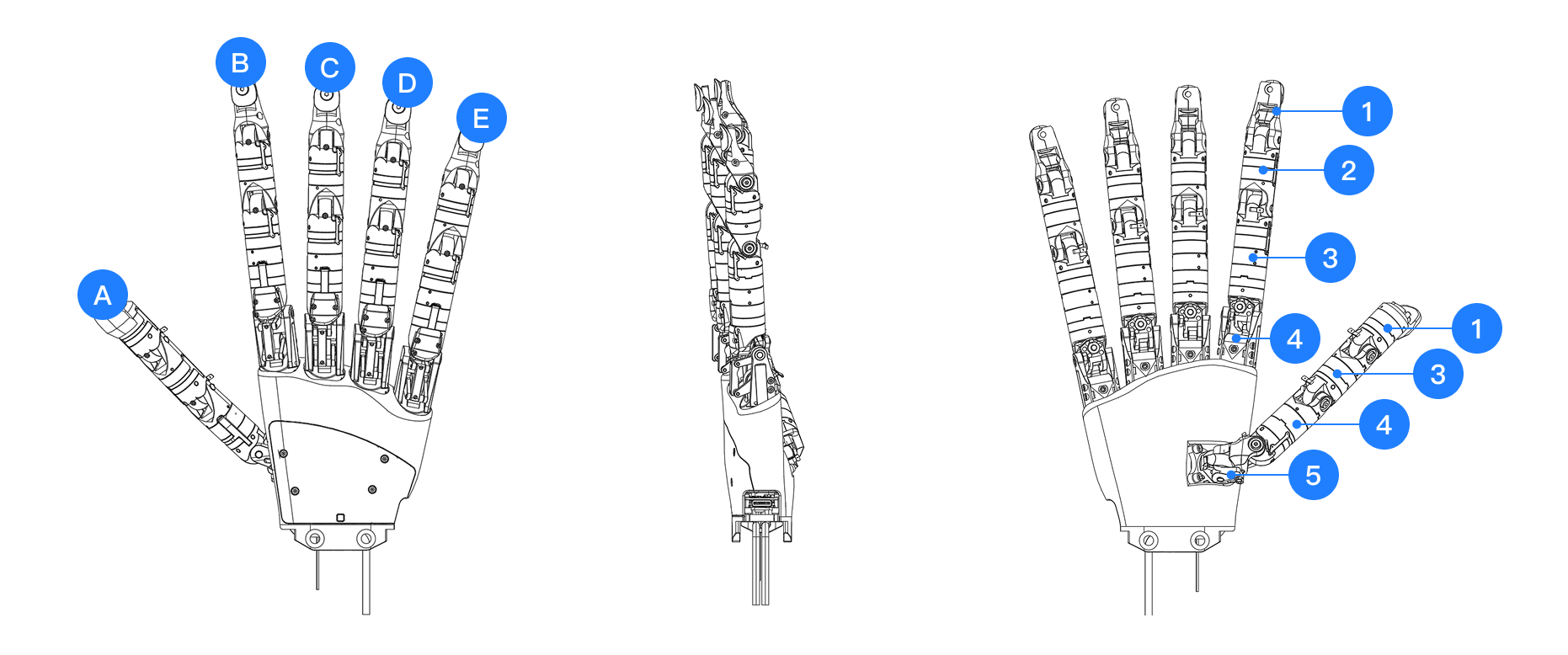
| Degrees of freedom | 20 active DoF | Large posture space across fingers |
| Weight | 580 ± 10 g, excluding cables | Plausible for compact 6/7-axis arms |
| Fingertip force | 15 N | Enough for stems and tools; too much for petals without limits |
| Static grasp load | 10 kg | Large holding margin |
| Durability | 300,000+ unloaded grasp cycles | Worth testing for repeated data collection |
| Interface | USB 2.0, SDK, ROS 2 | Integration path for ROS and learning stacks |
| Feedback | 1000 Hz joint state, Hall sensor, torque/position/current/temp | Useful for policy logs and diagnostics |
Meaning for Flower Work
WUJI Hand is not automatically a human-like floral arranger. Its best first tasks are stem bundle grasping, ribbon positioning, paper-fold handling, and tool use, where finger posture matters more than ultra-soft contact. Direct petal contact should be treated as a separate research target with soft covers, force limits, and contact-aware policies.
Practical experiment order:
- Grasp and release stem bundles
- Pick wrapping-paper corners
- Hold tape or ribbon ends
- Add vision/contact policies with petal no-touch zones
Strengths
- 20 active DoF gives more grasp expression than simple two-finger grippers.
- The 580 g class makes it plausible for OpenArm, xArm, Galaxea A1, and similar research arms.
- ROS 2 and SDK documentation reduce early integration friction.
- 1000 Hz state feedback is useful for imitation-learning datasets.
Risks
- Fingertip force is high for petals, so mechanical compliance or soft covers may be required.
- Published values are manufacturer specs; backlash, heat, noise, and repeatability need bench tests.
- Tactile-policy work depends on the actual sensor quality, calibration flow, and data access.
Integration Checklist
- Confirm ROS 2 package compatibility with the target OS and distro.
- Check availability of URDF, joint limits, and calibration files.
- Verify mount, cable, power, and communication clearance on the target arm.
- Test whether fingertip covers or soft pads can be replaced.
- Measure temperature and zero drift during long data-collection sessions.