ACT 데모: 배터리 슬롯 삽입 - 정밀한 양팔 조작
핵심 의의
- Action Chunking 개념 제시: 심리학에서 영감받아 연속 동작을 하나의 단위(chunk)로 묶어 실행 - compounding error 완화
- 극도의 데이터 효율성: 일부 태스크에서 단 10분 내외의 시연 데이터로 ~80-90%를 보고 - 정밀 조작에서 획기적
- 저비용 하드웨어 ALOHA: ~$20K로 양팔 섬세 조작 시스템 구축 가능, 모듈형 설계로 유지보수 용이
- 양팔 섬세 조작의 새 기준: 케이블 타이 끼우기, 배터리 삽입 등 기존에 어려웠던 정밀 작업 수행
- LeRobot 기본 추천 모델: HuggingFace LeRobot에서 기본으로 추천하는 모델로 채택
- 빠른 학습과 낮은 연산 요구: 일반 GPU에서도 학습 가능, 짧은 학습 시간
- CVAE 기반 아키텍처: Style variable(z)로 다양한 시연 스타일 캡처, 추론 시에는 prior mean 사용
Overview
ACT(Action Chunking with Transformers)는 Stanford에서 개발한 imitation learning 알고리즘입니다. 저비용 하드웨어 시스템 ALOHA와 함께 발표되어, 일부 양팔 섬세 조작(bimanual manipulation) 태스크가 10분 내외의 시연 데이터로도 가능함을 보고했습니다(태스크/데이터 조건에 의존).
| 항목 | 내용 |
|---|---|
| 발표 | 2023년 4월 (RSS 2023) |
| 저자 | Tony Zhao, Vikash Kumar, Sergey Levine, Chelsea Finn |
| 소속 | Stanford University |
| 논문 | arXiv:2304.13705 |
| 프로젝트 | tonyzhaozh.github.io/aloha |
Key Ideas
Action Chunking
심리학에서 영감을 받은 개념으로, 연속된 동작들을 하나의 단위(chunk)로 묶어 실행합니다.
기존 Behavior Cloning:
관측 → 정책 → 다음 1개 액션ACT의 Action Chunking:
관측 → 정책 → 다음 k개 액션 시퀀스 (예: 90 timesteps)장점:
- 태스크의 유효 horizon을 k배 줄임
- Compounding error 완화
- 더 부드러운 동작 생성
Temporal Ensembling
정책을 더 자주 쿼리하고, 겹치는 action chunk들을 평균하여 더욱 부드러운 동작 실행.
Architecture
ACT는 Conditional VAE (CVAE) 의 디코더로 학습됩니다.
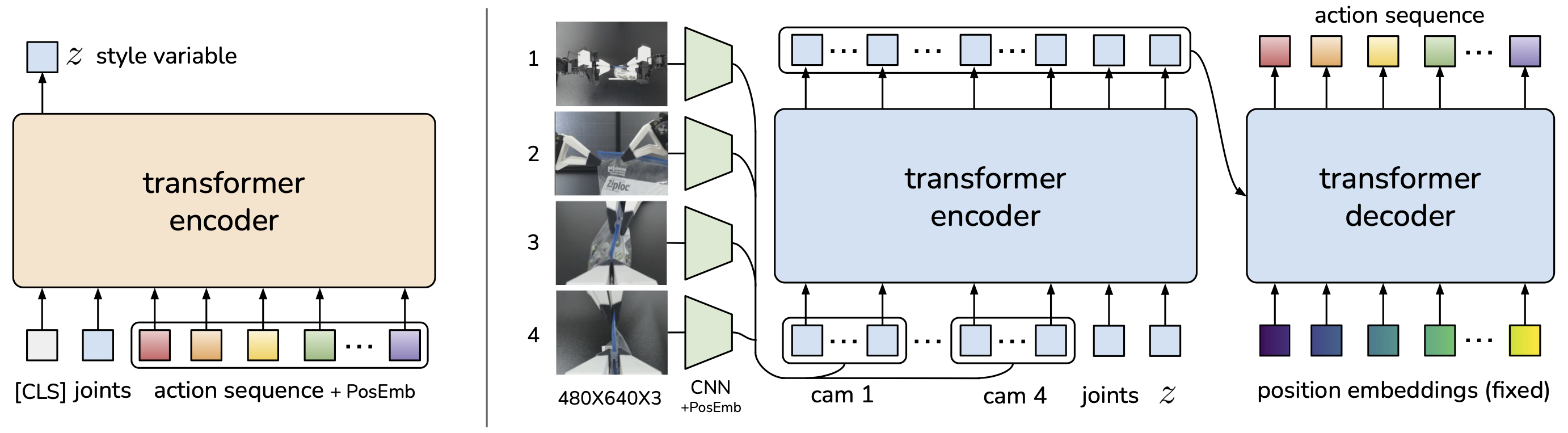
ACT 아키텍처: CVAE 기반으로 학습 시 style variable z를 인코딩, 추론 시 z=0 사용
입력:
- 4개 RGB 카메라 이미지 (480x640)
- 관절 위치 (joint positions)
출력:
- 90 timesteps의 액션 시퀀스
- 50Hz 제어 주파수
ALOHA Hardware
ACT와 함께 공개된 저비용 양팔 조작 시스템.
| 항목 | 내용 |
|---|---|
| 총 비용 | ~$20,000 |
| 로봇 암 | ViperX 6-DoF × 2 (각 ~$5,600) |
| 페이로드 | 750g |
| 작업 범위 | 1.5m span |
| 정확도 | 5-8mm |
| 특징 | 모듈형, Dynamixel 모터 (쉬운 교체) |
Performance
50개 시연으로 학습한 태스크 성공률:
| Task | Success Rate |
|---|---|
| 태스크 1 | 96% |
| 태스크 2 | 84% |
| 태스크 3 | 64% |
| 태스크 4 | 92% |
시연 데이터 효율:
- 일부 태스크에서 단 10분 내외의 시연 데이터로 ~80-90%를 보고(태스크/데이터 조건에 의존)
- 케이블 타이 끼우기, 배터리 삽입 등 정밀 작업 수행
Demonstrated Tasks
- 투명 소스 컵 열기
- 배터리 슬롯에 삽입
- 핑퐁공 저글링 (동적 태스크)
- 체인 조립 (접촉이 많은 태스크)
- 지퍼 타이 끼우기 (정밀 태스크)
ACT 데모: 투명 소스 컵 조작 - 반응형 양팔 협응
Impact & Adoption
ACT는 다음과 같은 이유로 널리 채택되고 있습니다:
- 빠른 학습: 짧은 학습 시간
- 낮은 연산 요구: 일반 GPU에서도 학습 가능
- 강력한 성능: 정밀 조작에서 높은 성공률
- LeRobot 통합: HuggingFace LeRobot의 기본 추천 모델
후속 연구
| 모델 | 설명 |
|---|---|
| ALOHA 2 | Mobile ALOHA, 개선된 하드웨어 |
| Bi-ACT | Bilateral Control 기반 확장 |
References
See Also
관련 인물
- Tony Zhao - 제1저자
- Chelsea Finn - 지도교수
- Sergey Levine - 공동 저자