Overview
| 항목 | 내용 |
|---|---|
| 최초 발표 | 2024년 3월 (GTC 2024) |
| N1 오픈소스 공개 | 2025년 3월 (GTC 2025) |
| 회사 | NVIDIA |
| GitHub | NVIDIA/Isaac-GR00T |
| 라이선스 | Apache 2.0 |
Version History
| 항목 | N1 | N1.5 | N1.6 |
|---|---|---|---|
| 발표 | 2025.03 GTC | 2025.05 Computex | 2025.09 CoRL |
| 파라미터 | 2.2B | 3B | 3B |
| VLM | Eagle2-1B | Eagle 2.5 (Frozen) | Cosmos-Reason-2B |
| DiT Layers | 16 | 16 | 32 |
| Action Space | Absolute | Absolute | Relative |
| 핵심 개선 | 최초 오픈소스 | FLARE, 언어 이해 2배 | 스케일업, Loco-manipulation |
Dual-System Architecture
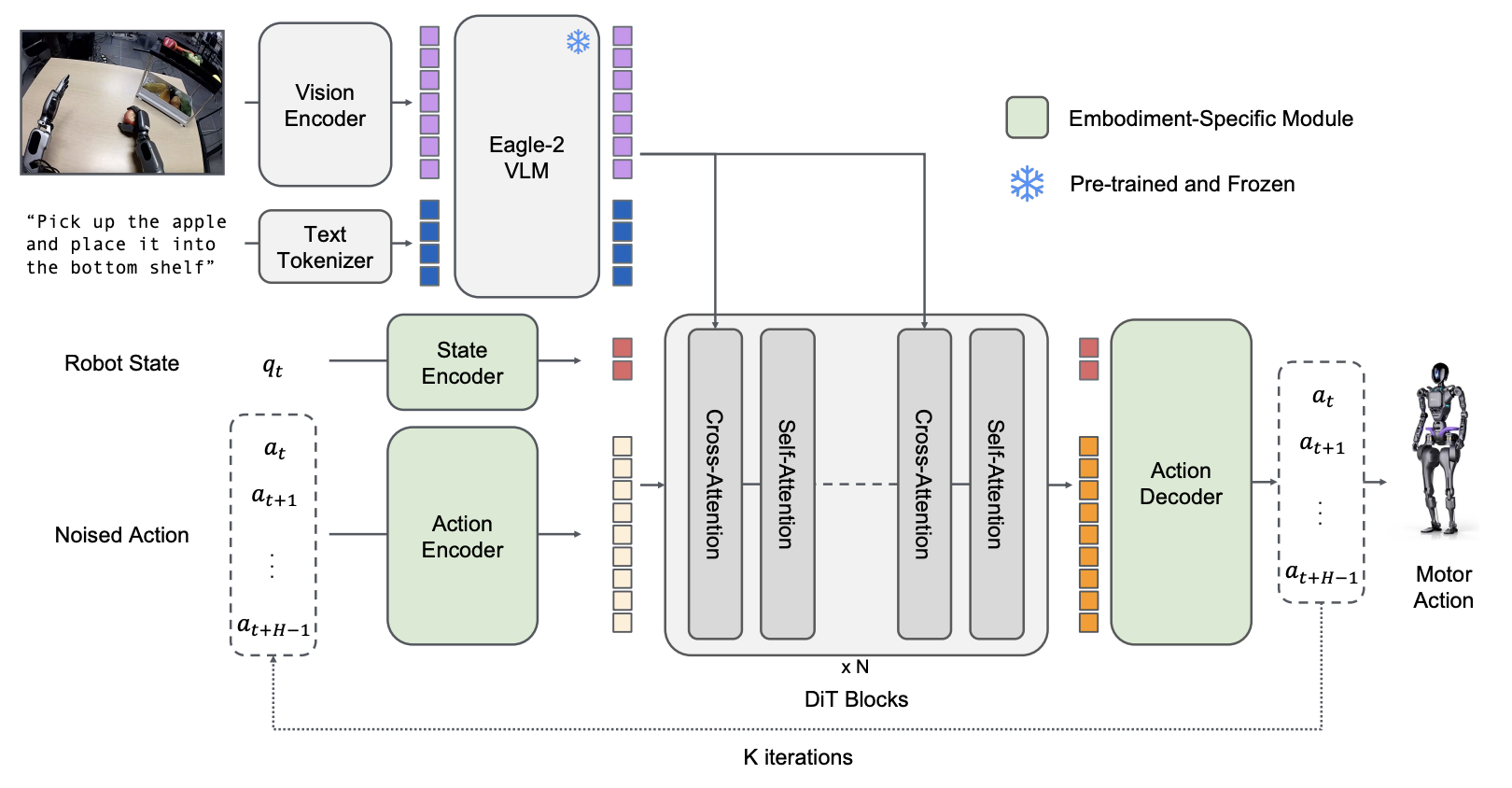
GR00T N1 아키텍처: System 2 (VLM) + System 1 (DiT) Dual-System 구조
인간 인지 원리(Kahneman, 2011)에서 영감받은 구조:
| System | 역할 | 구현 |
|---|---|---|
| System 2 (Slow) | 환경 이해, 계획 수립 | Vision-Language Model |
| System 1 (Fast) | 계획을 정밀 동작으로 변환 | Diffusion Transformer |
References
See Also
GR00T 시리즈
- GR00T N1 - 최초 오픈소스 모델
- GR00T N1.5 - 언어 이해 개선, FLARE
- GR00T N1.6 - 스케일 확대, Loco-manipulation