Gemini Robotics 공식 데모 영상
핵심 의의
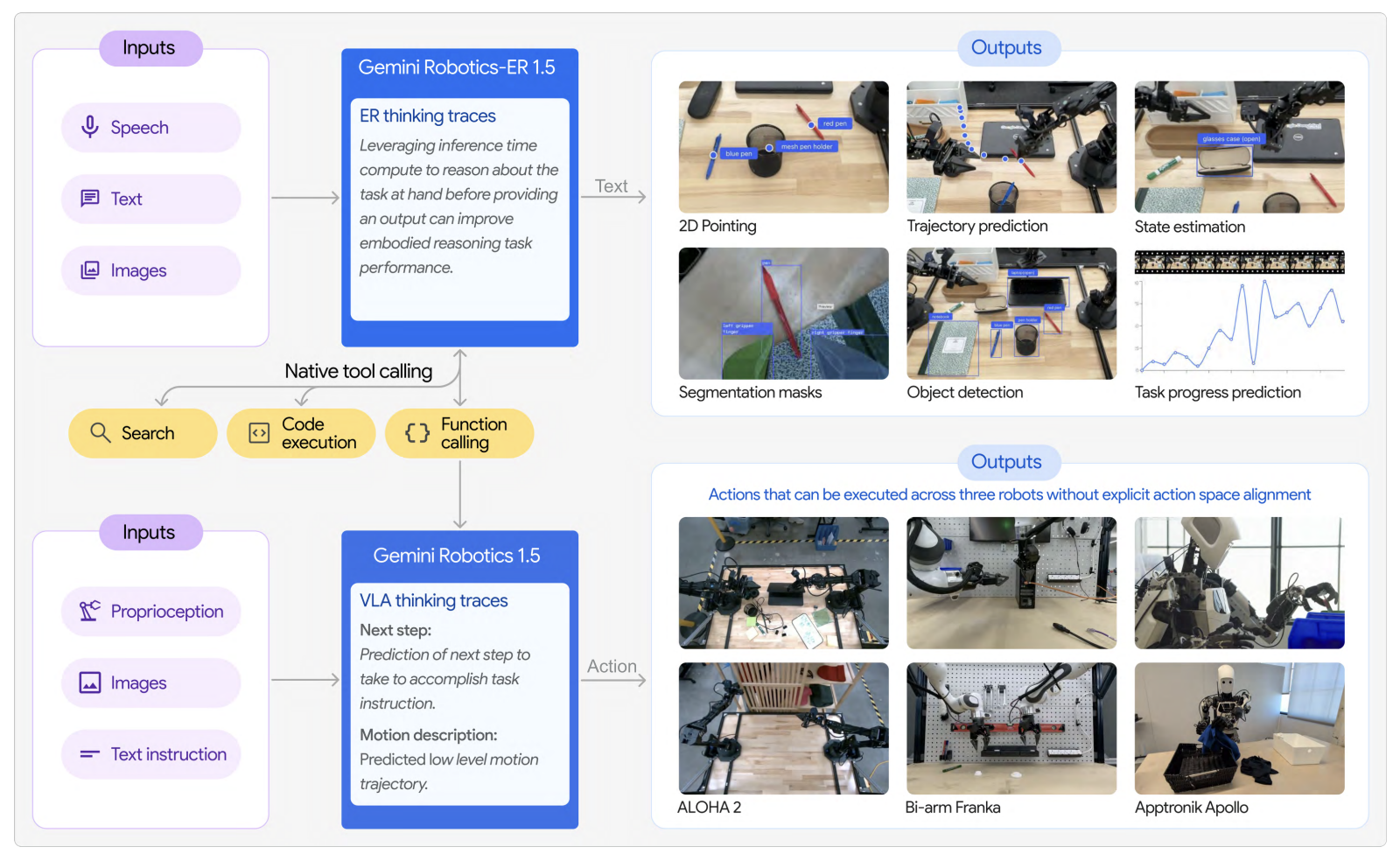
- 대형 LLM 기반 VLA의 정점: Gemini 2.0을 기반으로 하여 인터넷 스케일 지식을 로보틱스에 적용한 대표적 사례
- Cross-Embodiment 지원: 단일 모델로 양팔 고정형(ALOHA, Franka)부터 휴머노이드(Apptronik Apollo)까지 다양한 로봇 형태 지원
- System 1/2 구조: Gemini Robotics 1.5에서 “행동 전 사고(Think before action)” - 고수준 추론/판단은 클라우드, 실시간 액션 생성은 On-Device에서 수행
- On-Device 버전: 네트워크 독립적인 저지연 추론으로 실제 배포 환경 고려
- CoRL 2025 현장 데모: 학회에서 일반 참가자들이 직접 체험할 수 있는 부스를 운영하며 실제 동작 공개
- RT 시리즈 대비 데이터 확대: 학습 데이터 규모가 RT-1/2보다 크게 확대되었으나 구체적 수치는 비공개
- 산업 파트너십: Boston Dynamics, Agility Robotics 등 주요 휴머노이드 회사들이 신뢰 테스터로 참여
Gemini Robotics: Gemini 2.0 기반 VLA 모델 패밀리
Overview
Gemini Robotics는 Google DeepMind가 2025년 3월 발표한 Gemini 2.0 기반 로보틱스 모델 시리즈입니다. 물리적 행동을 새로운 출력 모달리티로 추가하여 로봇을 직접 제어할 수 있습니다.
| 항목 | 내용 |
|---|---|
| 발표 | 2025년 3월 12일 |
| 기반 | Gemini 2.0 |
| 논문 | arXiv:2503.20020 |
| 공식 | deepmind.google/models/gemini-robotics |
Model Family
Gemini Robotics (기본)
Gemini 2.0에 물리적 액션 출력을 추가한 VLA 모델.
Gemini Robotics-ER
Embodied Reasoning 능력을 갖춘 버전.
- 고급 공간 이해
- 로보틱스 프로그램 실행 지원
Gemini Robotics On-Device (2025.06)
로봇 기기에서 로컬 실행되는 가장 강력한 VLA 모델.
| 특징 | 설명 |
|---|---|
| 로컬 실행 | 네트워크 독립 |
| 저지연 | 지연 민감 응용에 적합 |
| 강건성 | 간헐적/제로 연결 환경 |
Gemini Robotics 1.5
가장 고성능 버전.
- 시각 정보 → 모터 명령 변환
- “행동 전 사고” (Think before action)
- 작업 과정 투명하게 표시
Core Capabilities
로보틱스 AI에 필요한 3가지 핵심 특성:
| 특성 | 설명 |
|---|---|
| General | 다양한 상황에 적응 |
| Interactive | 지시/환경 변화에 빠르게 반응 |
| Dexterous | 손가락으로 하는 섬세한 작업 수행 |
Performance
일반화 벤치마크에서 SOTA VLA 대비 2배 이상 성능
수행 가능 태스크
- 종이접기 (origami)
- 도시락 싸기 (packing lunch box)
- 샐러드 준비 (preparing salad)
- 기타 정밀 조작 태스크
Robot Compatibility
단일 모델로 다양한 로봇 형태 지원:
| 로봇 타입 | 예시 |
|---|---|
| 양팔 고정형 | ALOHA, Bi-arm Franka |
| 휴머노이드 | Apptronik Apollo |
Industry Partners
신뢰 테스터 (Gemini Robotics-ER)
- Agile Robots
- Agility Robots
- Boston Dynamics
- Enchanted Tools
전략적 파트너
- Apptronik: Gemini 2.0으로 차세대 휴머노이드 개발
Relationship with RT Series
| 모델 | 시기 | 특징 |
|---|---|---|
| RT-1 | 2022 | 첫 Robotics Transformer |
| RT-2 | 2023 | 첫 VLA (PaLM-E 기반) |
| RT-X | 2023 | 멀티 로봇 |
| Gemini Robotics | 2025 | Gemini 2.0 기반, 가장 강력 |
References
- Google DeepMind - Gemini Robotics
- Blog - Gemini Robotics
- Blog - On-Device
- arXiv Paper
- How Google Built Gemini Robotics