핵심 의의
- DiT 2배 확대: 16층 → 32층으로 Diffusion Transformer 스케일 확대
- Cosmos VLM 도입: Eagle에서 Cosmos-Reason-2B로 VLM 교체, 향상된 추론 능력
- Relative Action Space: 상대적 행동 공간으로 일반화 및 적응력 향상
- Sim-to-Real 성능 향상: 제로샷 시뮬레이션→실제 환경 전이 개선
- Loco-manipulation 지원: 이동과 조작을 결합한 전신 동작 지원
Overview
| 항목 | 내용 |
|---|---|
| 발표 | 2025년 9월 29일 (CoRL 2025, 서울) |
| 타입 | Vision-Language-Action (VLA) |
| 파라미터 | 3B |
| VLM | Cosmos-Reason-2B |
| DiT | 32 layers (N1.5 대비 2배) |
| Action Space | Relative Action Space |
| GitHub | NVIDIA/Isaac-GR00T |
| Hugging Face | nvidia/GR00T-N1.6-3B |
N1.5 대비 주요 개선점
1. DiT 레이어 확대 (16 → 32)
| 구분 | N1.5 | N1.6 |
|---|---|---|
| DiT 레이어 수 | 16층 | 32층 (2배) |
| 효과 | - | 더 부드럽고 덜 떨리는 움직임, 변화하는 위치에 쉽게 적응 |
32층의 더 큰 Diffusion Transformer는 상태 상대적 액션 예측과 결합되어 더 유연하고 적응력 있는 모션을 생성합니다.
2. Cosmos VLM (2B) 도입
N1.6은 Eagle 대신 NVIDIA Cosmos-Reason-2B VLM을 기반 VLM으로 사용합니다.
| 구분 | N1.5 | N1.6 |
|---|---|---|
| VLM | Eagle 2.5 (1B) | Cosmos-Reason-2B |
| 파라미터 | ~1B | 2B (2배) |
| VLM 학습 | 완전 동결 | 상위 4층 해제 |
| 어댑터 | 4층 트랜스포머 | 제거됨 |
Cosmos-Reason 주요 특징:
- 유연한 해상도 지원: 이미지를 패딩 없이 원본 종횡비로 인코딩 가능
- 심층 사고 기능: 로봇의 “깊이 생각하는 두뇌” 역할 수행
- 모호한 지시 해석: 사전 지식, 상식, 물리학을 활용하여 모호한 지시를 단계별 계획으로 변환
3. Relative Action Space (상태 상대적 액션 공간)
N1.6은 절대 관절 각도나 EEF 위치 대신 상태 상대적 액션 청크를 예측합니다.
| 구분 | N1/N1.5 | N1.6 |
|---|---|---|
| Action Space | Absolute | Relative |
| 동작 특성 | 고정된 위치 기반 | 현재 상태 기준 상대적 |
장점:
- 더 부드럽고 정확한 모션 생성
- 변화하는 위치에 쉽게 적응
- 덜 떨리는(jittery) 움직임
주의사항:
- 작은 데이터셋에서는 오류 누적이 발생할 수 있어 교정 능력에 영향
Architecture
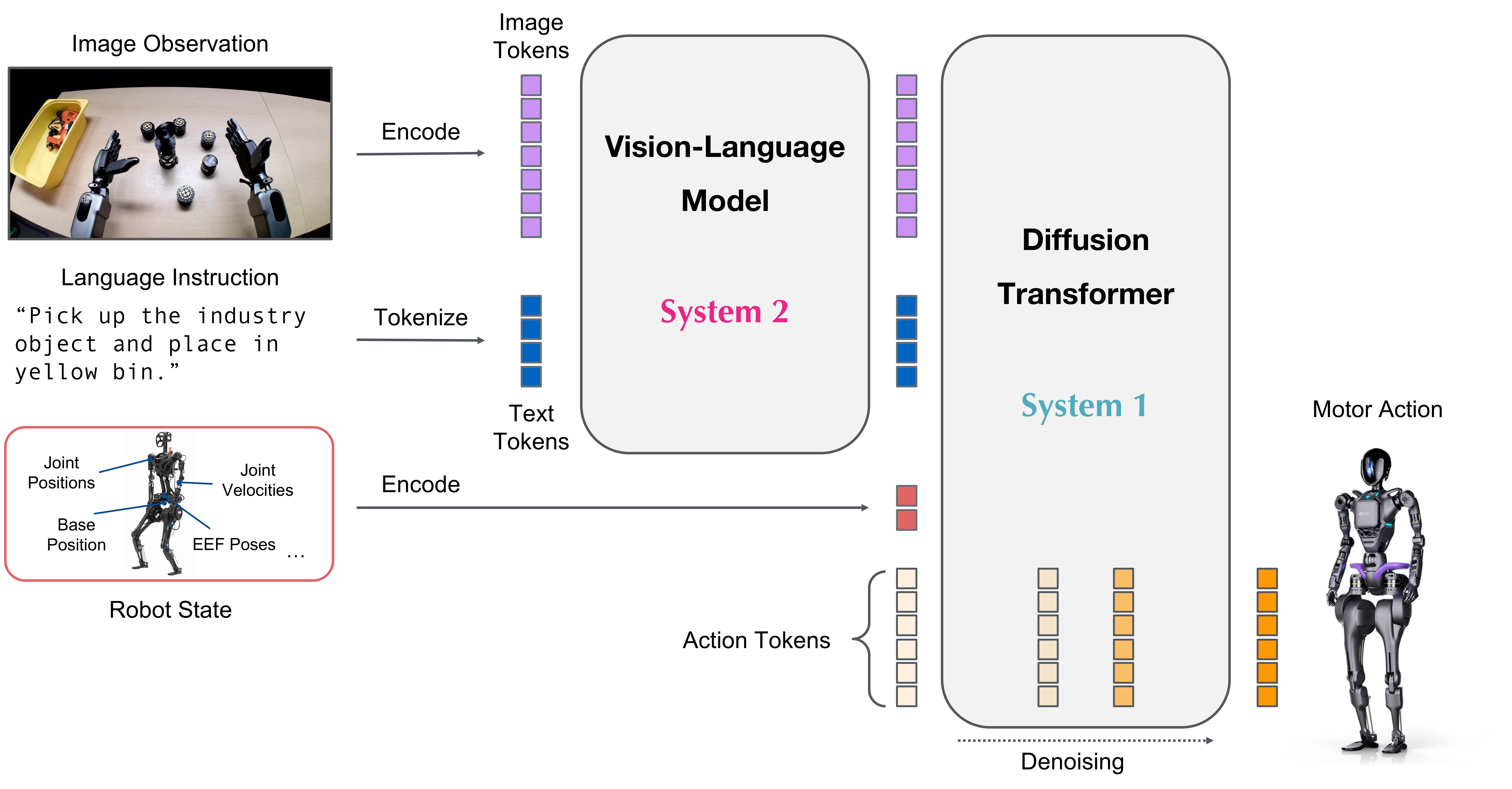
GR00T N1.6 모델 아키텍처 (출처: NVIDIA Research)
주요 아키텍처 변경 사항 (N1.5 → N1.6)
| 구성요소 | N1.5 | N1.6 |
|---|---|---|
| 기반 VLM | Eagle 2.5 (동결) | Cosmos-Reason-2B (상위 4층 해제) |
| DiT 크기 | 16층 | 32층 |
| VLM 후처리 어댑터 | 4층 트랜스포머 어댑터 | 제거됨 |
Benchmarks
평가 환경
N1.6은 다양한 시뮬레이션 및 실제 로봇 환경에서 평가됩니다:
| 평가 환경 | 설명 |
|---|---|
| LIBERO | LIBERO 데이터셋에서 20-40k 스텝 후처리 후 평가 |
| SimplerEnv | Google Robot fractal 데이터셋으로 파인튜닝 후 평가 |
| BEHAVIOR1k | 후처리 체크포인트 제공 |
| IsaacLabEvalTasks | 산업용 조작 작업 (Nut Pouring, Exhaust Pipe Sorting) |
실제 로봇 시연
NVIDIA Research 페이지에서 다음 작업들을 시연:
- 티셔츠 접기 (T-shirt folding)
- 물체 삽입 (Object insertion)
- 양팔 핸드오프 (Bimanual handoff)
- Unitree G1으로 loco-manipulation
성능 특성
NVIDIA Research 페이지에 따르면:
- N1.6은 N1.5보다 더 빠르게 수렴하여 더 부드러운 액션 생성
- 과적합 방지를 위해 더 세심한 튜닝 필요
- 5-6%의 실험 간 분산이 관찰됨
참고: N1.6의 구체적인 벤치마크 수치는 공식 연구 페이지에서 아직 공개되지 않았습니다. N1, N1.5의 성능 비교는 해당 문서를 참조하세요.
Training
사전학습
| 항목 | N1.6 |
|---|---|
| 사전학습 스텝 | 300K |
| 글로벌 배치 크기 | 16,384 |
| 후처리 스텝 | 10K-30K (배치 크기 1K 이하) |
사전학습 데이터 분포

GR00T N1.6 사전학습 데이터 분포 (출처: NVIDIA Research)
N1.6은 N1.5 대비 수천 시간의 새로운 텔레오퍼레이션 데이터를 추가하여 학습되었습니다.
주요 데이터 소스
| 데이터 소스 | 플랫폼 타입 | 설명 |
|---|---|---|
| 양팔 YAM 아암 | 양팔 조작기 | 정밀한 양팔 조작 작업 데이터 |
| AGIBot Genie1 | 세미-휴머노이드 | 다양한 조작 작업 데이터 |
| 시뮬레이션 Galaxea R1 Pro | 휴머노이드 | BEHAVIOR 스위트 기반 합성 데이터 |
| Unitree G1 | 휴머노이드 | 전신 로코-매니퓰레이션 데이터 |
파인튜닝 체크포인트
N1.6은 다양한 태스크/환경에 대한 파인튜닝 체크포인트를 제공합니다.
| 체크포인트 | 로봇 | 태스크 |
|---|---|---|
| GR00T-N1.6-bridge | WidowX | Manipulation |
| GR00T-N1.6-fractal | Google Robot | Manipulation |
| GR00T-N1.6-BEHAVIOR1k | Galaxea R1 Pro | Loco-manipulation |
| GR00T-N1.6-G1-PnPAppleToPlate | Unitree G1 | Loco-manipulation (Pick & Place) |
전체 목록 및 사용법: GitHub - Isaac-GR00T README
후처리 주의사항
- 동일 설정, 시드, 드롭아웃에서도 5-6% 성능 분산 관찰
- N1.6은 N1.5보다 더 빠르게 수렴하여 과적합 위험 증가
- 세심한 하이퍼파라미터 튜닝 필요
Supported Robots
N1.6에서 검증된 로봇 플랫폼:
| 플랫폼 | 타입 | 문서 |
|---|---|---|
| 양팔 YAM 로봇 | 양팔 조작기 | - |
| AGIBot Genie-1 | 세미-휴머노이드 | AGIBot |
| Unitree G1 | 휴머노이드 | Unitree Humanoid |
| Fourier GR-1 | 휴머노이드 | - |
버전별 비교 요약
| 특성 | N1 | N1.5 | N1.6 |
|---|---|---|---|
| 발표 | 2025.03 GTC | 2025.05 Computex | 2025.09 CoRL |
| 모델 크기 | 2.2B | 3B | 3B |
| 기반 VLM | Eagle2-1B (학습 가능) | Eagle 2.5 (동결) | Cosmos-Reason-2B (상위 4층 해제) |
| DiT 레이어 | 16 | 16 | 32 |
| Action Space | Absolute | Absolute | Relative |
| 사전학습 스텝 | 250K | 250K | 300K |
| 주요 특징 | 기본 VLA, 합성 데이터 | FLARE, 언어 이해 개선 | 스케일업, Loco-manipulation |
참고: NVIDIA Sim-to-Real Workflow
주의: 이 섹션은 N1.6 모델 자체의 기능이 아닌, N1.6과 함께 사용할 수 있는 NVIDIA의 로보틱스 워크플로우를 설명합니다.
상세 내용: Building Generalist Humanoid Capabilities with GR00T N1.6 (NVIDIA Developer Blog)
NVIDIA 개발자 블로그에서 소개된 sim-to-real 워크플로우는 세 가지 구성요소를 포함합니다:
| 구성요소 | 설명 |
|---|---|
| Whole-Body RL | Isaac Lab/Sim에서 강화학습으로 훈련된 동적 안정 모션 프리미티브 |
| COMPASS Navigation | 합성 데이터로 훈련된 네비게이션, 제로샷 sim-to-real 전이 |
| Vision-Based Localization | cuVSLAM, cuVGL, FoundationStereo, nvblox 등 CUDA 가속 라이브러리 |
References
GR00T N1.6
기술 블로그
뉴스
기반
See Also
GR00T 시리즈
- GR00T - 시리즈 개요
- GR00T N1 - 최초 오픈소스 모델
- GR00T N1.5 - 언어 이해 개선
관련 모델
관련 인물
- Jim Fan - NVIDIA GEAR Lab, GR00T 연구 리드