WUJI Hand
한 줄 판단
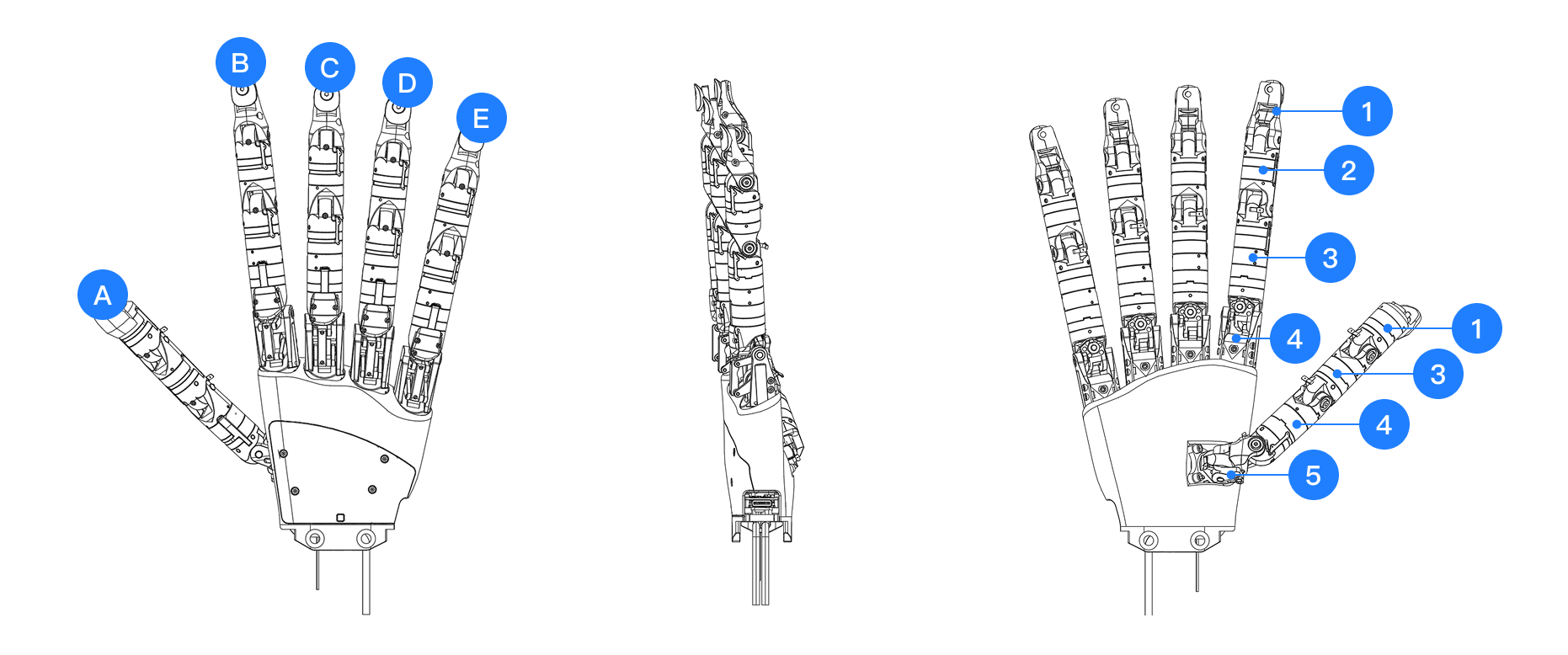
WUJI Hand는 꽃 작업 후보군에서 “고자유도 손동작을 실제 로봇 암에 붙여 빠르게 실험할 수 있는 핸드”에 가깝다. 무게가 가볍고 ROS 2/SDK가 공개되어 있어 연구 통합성은 좋지만, 꽃잎 접촉 같은 미세 힘 제어는 실제 센서 품질과 컨트롤 루프를 확인해야 한다.
핵심 수치
| 항목 | 값 | 해석 |
|---|---|---|
| 자유도 | 20 active DoF | 손가락별 독립 제어 폭이 큼 |
| 무게 | 580 ± 10 g, 케이블 제외 | 소형 6~7축 암에도 붙일 수 있는 편 |
| 손끝 힘 | 15 N | 꽃 줄기/도구 파지에는 충분, 꽃잎 직접 접촉은 과함 |
| 정적 파지 하중 | 10 kg | 물체를 놓치지 않는 여유가 큼 |
| 내구성 | 무부하 파지 300,000회 이상 | 반복 데이터 수집용으로 확인할 가치 있음 |
| 인터페이스 | USB 2.0, SDK, ROS 2 | LeRobot/ROS 파이프라인 연결 후보 |
| 상태 피드백 | 1000 Hz joint state, Hall sensor, torque/position/current/temp | 학습 데이터 로깅에 유리 |
꽃 작업에서의 의미
WUJI Hand는 꽃을 바로 “사람처럼” 다루기보다, 줄기 잡기, 리본 위치 조정, 포장지 접기, 도구 잡기처럼 손가락 자세가 중요한 작업에 먼저 맞다. 손끝 힘이 높으므로 꽃잎이나 얇은 잎을 직접 누르는 작업에는 소프트 패드, 힘 제한, 접촉 감지 튜닝이 필요하다.
추천 실험 순서는 다음이 현실적이다.
- 줄기 묶음 잡기와 놓기
- 포장지 모서리 집기
- 테이프/리본 끝단 잡기
- 꽃잎 접촉 금지 영역을 둔 시각-촉각 정책
장점
- 20 active DoF라 단순 2-finger gripper보다 파지 자세의 표현력이 크다.
- 580 g급이라 OpenArm, xArm, Galaxea A1 같은 연구용 암과 조합을 검토할 수 있다.
- ROS 2와 SDK 문서가 있어 폐쇄형 상용 핸드보다 통합 검증을 시작하기 쉽다.
- 1000 Hz 상태 피드백은 imitation learning 데이터셋 수집에 유리하다.
리스크
- 꽃잎 직접 조작에는 손끝 힘이 세다. 기계적 compliance나 소프트 커버가 필요할 수 있다.
- 공개 문서의 수치는 제조사 기준이므로 실제 반복 조작, 백래시, 열, 소음은 별도 검증해야 한다.
- 촉각 기반 정책을 만들려면 실제 taxel/힘 센서 품질과 캘리브레이션 도구를 확인해야 한다.
구매/통합 체크리스트
- ROS 2 패키지가 실제 목표 OS와 배포판에서 동작하는가
- URDF, joint limits, calibration 파일을 제공하는가
- 엔드이펙터 마운트와 전원/통신 케이블이 목표 암과 간섭하지 않는가
- 손끝 커버를 교체하거나 소프트 패드를 붙일 수 있는가
- 장시간 데이터 수집 시 온도와 영점 drift가 허용 범위인가